ICEINSPACE

|
Planetary Imaging and Image Processing
Submitted: Friday, 30th June 2006 by Mike Salway
IntroductionThis tutorial will cover planetary imaging and image processing, describing the steps and methods I use to process an image taken with a webcam such as the ToUcam. It is not intended to cover the actual capturing of the avi, though factors that influence good data capture and a guide to capture settings will be discussed. The most important factor in getting any high quality image is the seeing. If the data is great to begin with, then very little processing is actually required to end up with a great image. However most of us don’t have the luxury of imaging in an area with no jetstream, or in an area where the planet is directly overhead. Through experience I’ve found that when the conditions are less than ideal, a better result can be achieved through the processing steps outlined below. It’s worth noting now that there are many ways to process an avi, and this routine may not be for everyone. Sometimes the extra effort is not really worth it, and at other times it may produce a 5%-30% better image. For me, any improvement in the final result is worth the extra effort as I try and extract the most out of my equipment. It’s also worth noting that how a final image looks is a very personal preference. Colour balance, and the amount of contrast and sharpening are settings that you have control over, and you decide how the final image looks. Some people prefer a “natural” looking image with smooth detail and little sharpening. Other people prefer to increase contrast and sharpen the image more to enhance the finer detail and make it more visible. As I said, it’s personal preference and you’ll need to modify the steps below to suit your tastes. All of my imaging is done with modest affordable equipment. I use a 10” GSO dob (newtonian reflector) on an EQ platform by Round Table Platforms . The focal length is 1250mm. I use a ToUcam webcam as my capture device, with a 5x Powermate for increased focal length and image scale. The picture below shows my imaging setup.
Factors that Influence the Data you GetThere are many factors that influence the quality of the data you capture. You should ensure that you do all you can to minimise these factors and give yourself the best possible chance to capture good data. SeeingSeeing is King. If the seeing is very good, you’ll most likely get a very good image as long as you have the basics in order (collimation and cooling). Conversely, even if your collimation is perfect and the scope is at ambient temperature, if the seeing is no good, you just won’t get a good image. You can also try judging the seeing by the twinkling of the stars (naked eye). The more they are twinkling, the more likely it is that there’s turbulence in the atmosphere that will negatively affect the seeing. It’s not an exact science though so the best approach is to put a high power eyepiece in and check it out for yourself. If the view is stable and you can see reasonable detail, then put the webcam in and start capturing! CollimationCollimation is a basic skill that every telescope owner needs to master. If the collimation is not right, the image will always appear soft. You must learn how to collimate your scope! If you’re doing high resolution imaging, you should check your collimation before every imaging session and get it as close to perfect as possible. I’m not going to discuss how to collimate as there’s a thousand resources on the web that go into great detail, but make sure you learn how to do it. If you’re not sure you’ve got it right, get some advice on the IceInSpace Forums, or find another forum member that lives nearby and ask them to help you. The middle image below (courtesy Tom Hole) shows an array of collimation tools. CoolingIf the mirror temperature is not close to ambient, you’ll get a boundary layer of air sitting on top of the mirror which will distort your image and give the appearance of bad seeing. Often, tube currents and the boundary layer are misinterpreted as bad seeing. To help eliminate those factors, you should passively or actively cool your mirror down to ambient temperature. At a very minimum, take your scope out hours before you plan to begin imaging to allow the mirror to cool to ambient. If the ambient temperature is also dropping, the mirror will never catch up. That’s when you should think about actively cooling your mirror by using a cooling fan and/or peltier coolers. The image on the right below shows the results of my own cooling fan project. Hopefully another article will come in the future which describes how to do this.
AltitudeGenerally you have a much better chance of getting good data if you’re capturing when the image is higher in the sky. When the object is higher, you’re looking through less “junk” in the atmosphere and there’ll be less atmospheric distortion of your image. Sometimes we don’t have a choice, as depending on where you live, the planet might only reach 35° altitude. In those cases, you’ll always be struggling. Ideally, the planet should be above 50°. The higher the better! Capture DeviceThis article is mainly targeted to those using cheap webcams like the ToUcam to do imaging, but it also relevant for those using high end webcams like the Lumenera, DMK or PGR cameras. Some factors that influence the choice of capture device: Frame Rate and Compression Colour versus Mono
Capture SettingsAs long as the raw data you’re capturing isn’t too bright (overexposed) or too dark (underexposed), there’s not a lot that can go wrong here. ProcessingThe final step, and that’s where this tutorial comes in! :) All of those factors above can and will play a part in the quality of your image - so I'd recommend doing all you can to understand and address each of them. Capturing the DataThe capture settings you use will vary greatly depending on factors such as:
As such, there’s no “ideal” settings. You have to experiment to find the best combination for your scope and camera and local conditions. As a general guide, if you’re using K3CCDTools to capture, have the white level meter somewhere between 210 to 230. This ensures you have sufficient exposure to capture the dim areas, without overexposing and burning out the bright areas. Don’t be afraid of gain, even up to 50% or more if needed. A higher gain will make your image grainier, but if you can capture enough frames to stack you’ll be able to smooth it out. Don’t be afraid of gamma. I capture with 45-50% gamma, always. It makes the image look washed out during capture, but it ensures you’re capturing enough dynamic range in the dim areas. I reduce the gamma in post processing which enhances the contrast and reveals more detail. Check focus regularly! The focal point can change as the image gets higher in the sky, and as your mirror changes shape as the temperature drops. Some people check focus between each avi! I check it after every 2 or 3 avi’s. If you can’t get that snap focus you’re searching for, it’s likely that seeing and/or tube currents are the culprits. The total length of time you should capture each avi for varies depending on the object you’re imaging and it’s rotation speed. As a general rule, you can image Jupiter for 2 minutes, Saturn for 5 minutes or more (unless there’s a storm you’re trying to image), Mars for 4 minutes and the Moon for several minutes. The length of time also is determined by your effective focal length, as the longer the focal length you’re working at, the faster the rotation will be visible. Processing the DataOk, so you’ve got an avi or two. The old routine would involve simply running that avi through registax, aligning/stacking and wavelet processing to get the final result. That’s still a valid way to process, but I’ve found that the extra steps below help to get the most out of the data you’ve got. SoftwareYou’ll need some extra software to follow this processing routine. You can download the software by clicking on the links below. Virtual Dub (homepage) PPMCentre (homepage) PPMCentre Front End (PCFE download) RGBSplit (download) Registax (homepage) AstraImage (homepage) Photoshop CS (hompage) Processing StepsDirectory StructureCreate a directory such as e:\imaging. All of the required software should go there. Your avi’s should be captured (or moved) into that directory. I name them like “jup1.avi”, “jup2.avi”, and where I’ve had to capture multiple avi’s in the same capture window, append a sequence such as “jup3-1.avi”, “jup3-2.avi”. In that directory, I now create sub-directories for each of the avi’s where the bitmap files will be stored. So I’ll end up with e:\imaging\20060628\jup1bmp, e:\imaging\20060628\jup2bmp and so on.
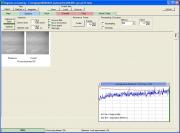
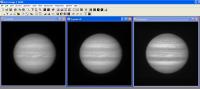
We’re now ready to start processing. Saving the AVI as BMP’s using VirtualDubThis step is required because ppmcentre and RGBSplit work on BMP files, not AVI files. It can be done in batch, or individually. At the moment, I pass each AVI through VirtualDub as soon as I’ve finished capturing it. By the time VirtualDub has finished (approximately 2 minutes), I’m ready to capture the next one. Using VirtualDub, open the avi. If you have multiple avi’s over the same capture period (2 minutes), combine them by using “Append AVI” after opening the initial one. I use the right and left arrows to move through the avi and delete any obviously bad frames blurred due to a bad moment of seeing, bumping the scope, or the planet drifting off the edge of the frame due to inaccurate tracking. Then go to File -> Save Image Sequence, and save as a set of BMP files into your BMP directory. See example below.
Run the BMPs through PPMCentreUsing PPMCentre has 3 main advantages:
By default, it will simply centre the object in the middle of the frame. The extra command line parameters are for additional features such cropping and ranking. You can see all the command line options and what they do by visiting the ppmcentre homepage. To run ppmcentre, you can either run it directly from a dos window, or use the handy GUI written by Adam Bialek. To run it from DOS, open up a dos window (Start -> Run -> “cmd”), and change directory to your imaging directory by typing “cd e:\imaging”. Run ppmcentre on one of your bitmap directories by typing the following:
You can repeat this for all of your BMP directories. To run it from the frontend GUI, choose the BMP folder(s) you want to process, check and set the command line options you want to use, and hit process! I overwrite my original bitmaps with the ppmcentre-processed ones. You can choose to write the processed bitmaps out to a new directory. It’s up to you.
Splitting the BMP’s into R/G/B channelsThere’s nothing stopping you from taking the resulting BMP’s from ppmcentre and feeding them straight into registax now, rather than go through the extra step of splitting them into r/g/b channels. In fact, this is exactly what I do after each imaging session, as it allows me to get a feel for the quality of each avi and determine which of the avi’s I captured have the best quality, sharpest data. I’ll drag the BMP’s from windows explorer into registax, and process it like any other avi or set of bitmaps (align/reference frame/optimise/stack/wavelets). I spent as little time as possible here, as I’m just using to judge the quality of the avi. I save the resulting image as a “quick” run, and repeat this for all “sets” captured during that session. If some avi’s are obviously bad, I delete them and their bitmaps. If some avi’s are obviously better, these are the ones I’ll spend the most time on processing, and they’ll receive the lengthier processing of splitting into R/G/B channels and separate processing. If I want to create an animation, I’ll process all avi’s using the methods below so that all images that make up the animation look and feel the same. So now you’ve decided to split the BMP’s that ppmcentre produced, into their red, green and blue channels. The reason I choose to do this, is because:
To split the BMP’s into their red, green and blue channels, use the GUI developed by Adam Bialek. Simply add the folder name(s) that contain the BMP’s, set the parameters and hit Process. You’ll end up with 3 sub-directories (Red, Green, Blue), each containing the respective red, green and blue channels from the original colour bitmap. If in doubt, read the walkthrough documentation for RGBSplit.
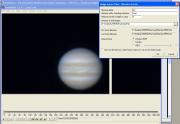
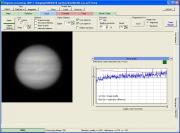
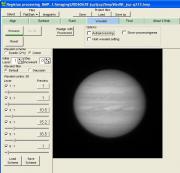
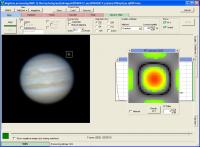
Registax ProcessingEveryone should be familiar with registax already, but I’ve found that most people use it in slightly different ways as there’s so many settings that can be changed. In this section I’ll describe how I use registax to produce a stacked, processed image of each colour channel from the bitmaps that have already been passed through ppmcentre and then split into R/G/B channels by RGBSplit. Open up registax, and then back in Windows Explorer, select all of the bitmaps in your “Red” directory by clicking Ctrl-A. Drag them onto the registax window and let them go. Alignment If you used the qestimator and renumber options in ppmcentre, then find the frame marked “jup1-q0000” for example. That will be the best quality frame as determined by ppmcentre. Put the focus on the frame selector at the bottom, and use your left and right arrows to scroll through the frames to find frame q0000. You can see in the screenshot the settings I use (that is, gradient algorithm). You can ignore the cutoff % for now, as we change this manually later.
I use a 128px alignment window, and select a feature of interest that you want to be sharp – for example, the GRS, a moon transit shadow, etc. Click align, and wait for it to get to 100%. Ideally, you should end up with a graph that slopes up to the right, starting low on the left. The best quality frames are on the left end, and the worst quality are on the right. Here’s when we decide to drop some frames from further processing. Using the frame select slider down the bottom, drag it left or right to a point where the graph starts rising up sharply. Everything to the left of the slider is kept, everything to the right is thrown away. In this example below, because the seeing was quite good, the quality of most of the frames is high so i've decided to keep almost all of them. Once you’re happy, hit Limit to move to the Optimise tab.
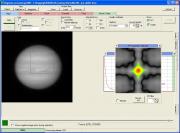
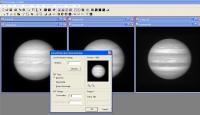
Optimise The first thing I do when reaching this tab, is to create a reference frame. This gives the optimiser a “better” frame in which to compare all other frames against. I leave the default of 50 frames, and hit “Create Reference Frame”. Once you end up in the wavelets tab and click “ok” past the information message, I set wavelet 3 to 10.5 and wavelet 4 to 15.2, and that’s it. You can save those wavelet settings by clicking “Save Settings” and call it something like “mild”. Next time, you just use “Load Settings” and choose “mild”, and it will apply those settings. See the left image below for how it looks. Press “Continue” to go back to the Optimise Tab. Click “Optimise” and registax will usually make 3 passes through the frames, and the resulting graph will hopefully be sloping up from low on the left to higher on the right. See the right image below for how it looks. Now move to the Stack tab.
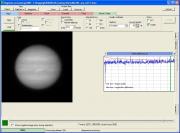
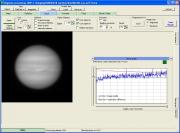
Stack Click the “Stack Graph” tab on the right hand side. This is where you choose how many frames you want to stack. The choice is a fairly important one, as if you stack too few frames, the image will be noisy and grainy. If you stack too many, you may end up stacking bad quality frames in with good ones, which will soften the image and it’ll be less sharp after applying wavelets. The left image below shows the stack graph. You can drag the vertical slider down or the horizontal slider to the left to restrict the number of frames you want to stack. Everything above the horizontal line and to the right of the vertical line will get thrown away. The number of frames that will be stacked is shown in the status bar at the bottom (n=161 seen in the left screenshot below). How many you should stack depends on the quality of the data and how many frames in total you’ve got to choose from. I tend to stack between 100 to 160 frames, where I’ve captured a total of about 600 using 5fps for 120 seconds on Jupiter (for example). In general, I believe it’s better to stack less GOOD frames than more BAD frames. Try and drag the vertical slider down to the point where the graph starts rising up too high on the right. Click Stack to begin, and when it’s finished you’ll see the resulting stacked image before any further processing (right screenshot below). Now move to the wavelets tab.
Wavelets Now to the fun part.. Wavelet processing is mostly black magic to me. There’s a thousand sites on the internet where you can read about wavelets, what they are and how they work, but in our context, I think it’s enough to know that it’s a way to reduce noise and extract detail from an image. I apply the following wavelets to the image: 3 @ 10.5, 4 @ 15.2, 5 @ 16.5. I’ve got those settings saved, so when I come into the wavelets tab I just load settings, and it’s done. Click “Save Image” on the right hand side, and save as a TIFF. I call it something like “jup2-red.tif”.
That’s the red channel done for now! I close registax and re-open it, and now I select all the bitmaps from the Green folder, and drag them into registax. I repeat exactly the same process, and save the image as “jup2-green.gif”. Rinse and repeat for the blue channel bitmaps. Our time with registax is done, now to process those images in AstraImage! AstraImage ProcessingI use AstraImage to perform deconvolution on each of the images saved from registax, before recombining them back into a colour image. Deconvolution is an iterative image processing filter that uses Fourier transform mathematics in an attempt to reverse the optical distortion that takes place in a telescope, thus creating a clearer image. Again, it’s mostly black magic to me but through experimentation I’ve found some processing that helps to reveal detail and sharpen the image. Open each of your images saved from registax (jup2-red, jup2-green and jup2-blue).
At this stage, they are classified as colour images (even though they single channels), so they have to be converted to greyscale. On each image, click “Process -> Greyscale”. It does an implicit histostretch on the image so you’ll usually end up with a brighter image after this step. I now usually do a LR deconvolution on each of the greyscale images, with the iterations at 7 and the curve radius of 1.4.
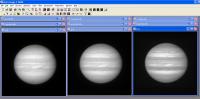
The values you use here depend on the quality of the data, how sharp it already is, and how many frames you stacked in registax. It’s really trial and error to find the right settings for each circumstance so I suggest you simply experiment.. try a smaller curve radius, try less iterations, try more, etc. Ideally you’re after a resulting image that has revealed more detail without being oversharpened. You can tell if you’re oversharpening because the features start looking bloated and you’ll start getting hard ringing around the edge of the planet. The image on the left below shows the result after all 3 channels have had LR deconvolution applied. You can also try ME deconvolution, VC deconvolution and/or FFT filtering. There’s a lot of different settings you can try – as I said, just experiment and find what works for you. We now want to recombine the individual channels back into a colour image. You do this by clicking on “Process -> Recombine”. In the dialog, for the red dropdown you want to choose the image that had LR deconvolution performed on the Red channel. Same for the other 2 channels. The easiest way is to rename the images after they’ve had LR deconvolution applied – do this by clicking “Edit -> Image Title”, and call it something like “LR-red”, “LR-green”, and so on. That way, in the dropdowns you can find the correct images to recombine. Once you’ve selected them in the dropdown, click “Update”. You now need to align the colour channels before clicking apply, as they can be misaligned by a few pixels due to atmospheric dispersion. The image on the right below shows the recombined image before being realigned.
What you’re looking for here, is a red or blue rim around the planet in one direction only. For me, blue usually needs to be moved down and to the right, and red usually needs to be moved up and to the left. But not always – it depends on the altitude that the image was captured at, as the higher the altitude, the less atmospheric dispertion. You can try zooming in to get a better view, but the preview window does leave a lot to be desired. In this example, blue had to be moved down 1 pixel and to the right 1 pixel. Red had to be moved up (-1) 1 pixel. You can see from the preview window (image on the left) that there’s now no blue or red rim and the colour channels are nicely aligned. You can now hit apply and see the recombined colour image (middle image below). Because I capture with high gamma, now I want to reduce the gamma to give greater depth and contrast. Click on “Scale->Brightness and Gamma”. I reduce to 0.7, click apply. You can see the image after gamma reduction on the right below. Save the image as TIFF, and take it into Photoshop!
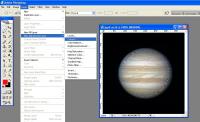
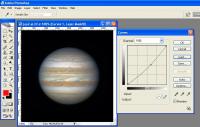
Photoshop ProcessingI use photoshop to do any final adjustments to the image, and also to save it for the web. The adjustments may include levels or curves adjustment, saturation, colour balance and final unsharp mask. What final adjustments are needed depend mostly on personal taste, so the process outlined here should be taken as a guide only. I open the TIFF, and use the circle selection tool with a feather of 35px to select the inside edge of the planet. I create a new curves layer, and adjust the curves down as shown in the left image below, to give more colour depth and contrast. The left image below shows the selection, and the right image shows the curves used.
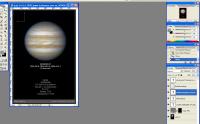
If required, I create new layers to adjust colour balance or saturation to taste. I then select the background layer again, and apply an unsharp mask. The radius and pixel size I use depends on how much sharpening is required. Sometimes this step introduces too much grain or artefacts from oversharpening, so use it in moderation. The resulting image is the left one below. And that’s basically it. I now add the “fluff” around the image for presentation. I save the image with the layers as a PSD file incase I want to edit it later, and I save it as TIFF (with no layers) as well.
Processing with Moons in the FrameIf your avi has satellites in the frames as well, it’s worth more time again to process the moons separately from the main planet. Aligning on a feature on the planet will make the planet sharp, but the moon part of the frame may not be sharp. Also, if the moon moves slightly during the capture time then it can end up elongated and not round. To process the moons separately, most times it’s probably not worth the extra effort of processing the moon in red, green and blue channels. Just take the colour bitmaps from ppmcentre, and feed them into registax. Find a sharp frame where the moon is nice and round, and use a 32px alignment window to select it. Go through the same registax processing outlined above, and save the image as a TIFF, for example “jup1-ganymede.tif”. The image on the left below shows the moon being selected in the alignment tab in registax. Open the moon TIFF, and the processed planet TIFF in photoshop. The planet TIFF will be your master image. On the moon image, use the rectangle select tool to select the moon and part of the planet (to help with aligning), and copy the selection. Go back to the planet image and paste the selection as a new layer. Use the move tool to line up the pasted moon layer over the top of the original. Once it’s lined up, select the area of the moon layer that covered the planet, and press delete to delete it from that layer. It leaves the moon on its own in the new layer, on top of the planet picture on the bottom layer. The image on the right below shows this process, and shows the benefit of separate processing as the moon on the final image is sharper with better colour detail.
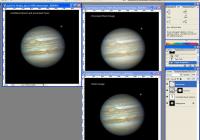
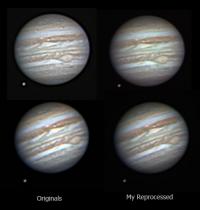
Some Before and After ExamplesHere are a few examples of some images that I’ve offered to reprocess for the imager, because I’ve seen that the data is good quality but the processing didn’t bring out the best in it.
My reprocessed versions were done using the exact methods outlined above.
Processing ExamplesHere are a few of my animations taken between February and June 2006, processed using the methods outlined above. The animations were created in Jasc Software Animation Shop 3. All the animations are GIF files, and are between 300-600kb. Animations
ConclusionAs mentioned at the start of the article, there are a bunch of different ways to process an avi. My method may not be for you, but it may be worth giving a try. It’s a longer process than most people go through, but if it gives an even 5-10% better image, then it’s worth the extra hassle. I hope this article helps you to produce better images. I welcome your feedback. Article by Mike Salway (iceman). Discuss this article on the IceInSpace Forum.  |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||